프로세서
프로세서(processor), 흔히 컴퓨터에서 중앙 처리 장치(central processing unit; CPU)로 알려진 하드웨어는 프로그램의 기계어를 처리하는 전자회로이다. 프로그램을 실행하기 위해 필요한 시스템의 다양한 작업들은 명령어 집합(instruction set)에 의해 정의되어 있으며, 대표적으로 x86과 ARM 계열 명령어 집합 아키텍처가 있다. 그리고 프로세서에서 처리할 수 있는 명령어 집합이 무엇인지에 따라 시스템 아키텍처가 함께 결정된다.

프로세서 코어
프로세서 코어(processor core)는 CPU에서 실질적인 연산을 도맡는 전자회로 하드웨어이며, CPU 칩 안에는 한 개 이상의 코어로 구성된다. 실제 연산이 이루어지는 부품인 관계로 흔히 각 코어를 CPU에 번호를 붙여 칭하는 경우가 대다수이다. 예를 들어 헥사코어 CPU에는 프로세서 코어가 여섯 개가 들어있어 CPU #0 - 5까지 나열되며, 동시에 최대 여섯 개의 스레드를 처리할 수 있다.
논리 프로세서
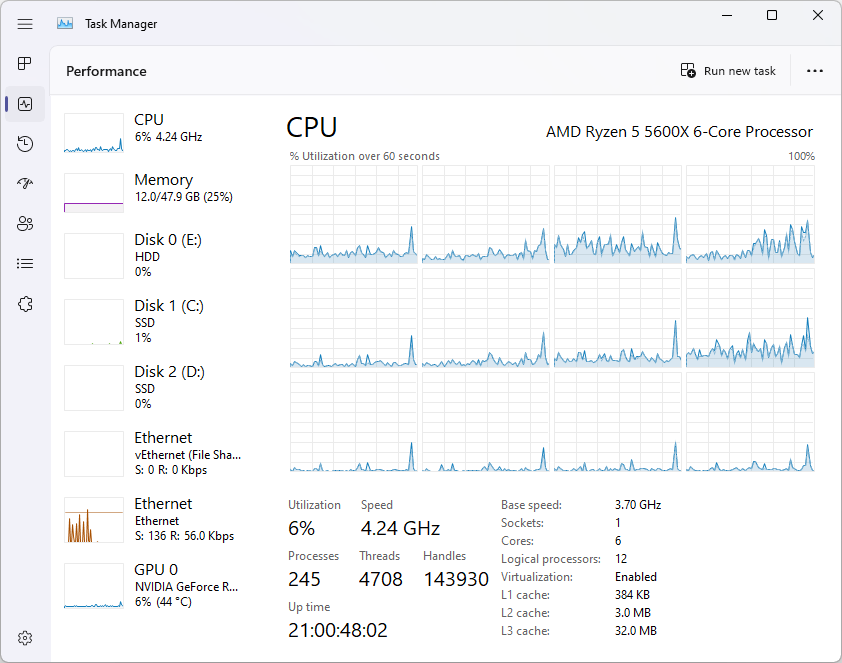
논리 프로세서(logical processor)는 프로세서 코어가 여러 스레드를 더욱 효율적으로 처리할 수 있도록 하는 멀티스레딩 기술에서 기반하여 (인텔의 하이퍼스레딩, 그리고 AMD 및 ARM 계열의 SMT 등), 마치 하나의 프로세서 코어가 두 개 이상의 프로세서를 가진 듯이 운영된다. 아래는 코어가 여섯 개가 있는 AMD 프로세서이지만, 각 코어마다 두 개의 논리 프로세서를 가지므로 총 12개의 프로세서가 있는 것으로 운영체제가 판단한 것이다.
프로세서 클럭
클럭 속도(clock speed; clock rate) 혹은 클럭 주파수(clock frequency)는 프로세서가 작업을 수행하기 위해 필요한 동기화 시점의 기준이 되는 펄스 신호를 클럭 발생기로부터 얼마나 빈번하게 생성할 수 있는지를 가리키는 헤르츠(Hz) 단위의 수치이다. 주파수가 높을수록 동일한 시간 간격에 동기화가 더 자주 일어나기 때문에 더 많은 작업을 수행할 수 있어, 결국 프로세서의 작업 처리 속도와 일치한다.
프로세서 코어의 예시로 보여준 작업 관리자에서는 당시 클럭 속도가 4.24 GHz로 측정되었다. 단, 이는 컴퓨터가 1초에 42.4억 개의 작업을 처리한다는 의미와 거리가 멀다.
CPU 스로틀링
동적 주파수 스케일링(dynamic frequency scaling), 일명 CPU 스로틀링(CPU throttling)은 전력 관리 기법으로, 전원 절약 및 CPU 발열 등의 필요에 따라 실시간으로 프로세서의 클럭 주파수를 자동으로 조절한다. 작업 관리자에서 프로세서 속도가 지속적으로 바뀌는 이유가 CPU 스로틀링에 의한 것이며, 발열이 심할 경우에는 MHz 단위까지 내려가 마우스 및 키보드 응답 지연이 가시적으로 나타나기도 한다.
프로세서 시간
프로세서 시간(processor time)은 순전히 한 개의 프로그램만을 처리하기 위해 CPU가 할애한 시간이다. 스케줄링이나 입출력 요청 대기 등의 작업에 의해 항시 프로세서에서 처리되지 않는다. 아래 그림에서 P1 프로그램만을 처리하는 데 CPU를 사용한 시간은 파란색 블록의 총 너비로 계산된다.

CPU 시간은 곧 CPU 사용량(%)을 반영하기도 한다: 일정한 간격으로 샘플링되는 구간동안 해당 프로그램이 CPU에서 얼마나 오래 처리되었는지를 토대로 계산된다.
유휴 프로세스
유휴 프로세스(idle process)은 아무런 작업을 하지 않는 프로세서를 나타내기 위한 가짜 프로세스이다. 만일 유휴 프로세스의 프로세서 사용량이 90%로 집계된 경우, 이는 반대로 프로세서의 10%만이 실제 실행 중인 프로세스를 처리하는 작업에 동원되고 있음을 의미한다.
보호 링
보호 링(protection ring)은 데이터와 기능을 결함과 위협적인 행위로부터 보호하는 메커니즘이다.

보호 링은 시스템 운영체제의 권한(privilege) 구조를 이루는 계층으로써, CPU 구조가 하드웨어적으로 어떤 모드에 있는지에 따라 권한에 의해 제한된 일부 명령어들 활용 가능여부가 결정된다. 해당 명령어들은 CPU 및 메모리와 같은 하드웨어를 직접적으로 상호작용하므로 자칫 잘못하면 시스템에 치명적인 문제를 야기한다.
윈도우 NT 운영체제는 만일을 대비해 x86 프로세서가 제공하는 네 개의 링 계층 중에서 오로지 Ring 0 그리고 Ring 3만 사용한다:
-
커널 모드(kernel mode)
일명 수퍼바이저 모드(supervisor mode)는 시스템에 민감한 영향을 줄 수 있는 입출력 동작이나 메모리 접근에 아무런 제약을 받지 않고 아키텍처의 모든 작업을 수행할 수 있다. 가상 주소 공간 중 커널 공간(kernel space)에서 작업을 처리한다. 대표적인 예시로 디바이스 드라이버(device driver)와 같은 커널 모듈(kernel module)이 커널 모드에서 동작한다.
-
사용자 모드(user mode)
사용할 수 있는 CPU 작업이 커널 모드에 비해 하드웨어 상호작용 등 민간한 시스템 구성요소의 접근이 제한된다. 만일 커널 동작이 요구되면 시스템 호출(system call)을 통해 커널에 요청을 해야 한다. 가상 주소 공간 중 사용자 공간(user space)에서 작업을 처리한다. 대표적인 예시로 일반 어플리케이션의 프로세스가 사용자 모드에서 동작한다.
이렇게 보호 링이 분류된 이유는 “더 많은 제어에는 더 큰 책임이 뒤따른다”는 관점에서 비롯된다. 커널 모드의 프로그램 오동작은 시스템 전체에 충돌을 일으켜 블루스크린을 야기하는 원인이기 때문에 매우 신중하게 개발되어야 한다.
스케줄링
스케줄링(scheduling)은 처리되어야 할 리소스(즉, 프로세스)의 작업(즉, 스레드)을 사용 가능한 프로세서 코어에 분배 및 할당하는 행위이며, 이를 담당하는 프로그램을 스케줄러(scheduler)라고 부른다. 스케줄링에 의해 운영체제는 멀티태스킹이 가능해져 여러 프로그램 및 기능을 동시에 실행할 수 있는 것처럼 보여진다.
스케줄링된 프로세스는 퀀텀(quantum)이란 일회성 시간제 티켓을 부여받는데, 이는 CPU가 프로세스를 처리하는 데 주어진 고정된 시간이다. 처리 도중에 프로세스의 퀀텀이 소진될 시, CPU는 해당 작업을 완료여부와 상관없이 즉각 중단하고 실행 큐에서 스케줄링 대기 중인 다음 프로세스를 처리한다. 한편, 작업이 마무리되지 못한 프로세스는 다시 실행 큐로 되돌아가 스케줄링이 되기를 기다린다.
윈도우 NT 운영체제는 선점형 라운드 로빈(pre-emptive round-robin) 스캐줄링 알고리즘을 사용한다.
프로세서 실행 큐
각 프로세서 코어마다 처리될 스레드가 대기하는 실행 큐(run queue)가 존재하며, 우선순위가 높은 순서대로 나열된다. 실행 큐에 대기할 수 있는 프로세스 개수에는 제한이 없으나, 이로 인해 문맥 교환이 빈번하게 일어나면 성능 저하의 요인으로 작용할 수 있다. 멀티프로세서 시스템의 경우, 실행 큐에 대기 중인 프로세스 개수는 프로세서 코어의 논리 프로세서 개수만큼 나누어 계산하도록 한다.
문맥 교환
문맥(context)은 프로세스 및 스레드가 중단된 시점으로부터 작업을 재개하기 위해 필요한 정보들이다: 스택, 레지스터 등이 해당한다. 그리고 문맥 교환(context switch)은 실행 중인 프로세스 및 스레드를 나중에 재개할 수 있도록 문맥을 저장하여 대기시키고, 처리되어야 할 문맥을 불러와 실행하는 절차를 가리킨다. 스케줄링과 함께 멀티태스킹을 가능하게 만드는 핵심 기능이다.
프로세스의 문맥보다 스레드의 문맥 데이터가 더 작은 관계로, 멀티프로세스보다 멀티스레드의 문맥 교환 작업이 더 빨리 이루어진다.
일반적으로 문맥 교환이 이루어지는 요인으로 다음과 같다:
- 스케줄링된 퀀텀 소진
- 우선순위에 의한 선점
- 프로세스의 대기 상태 전환
프로세스 상태
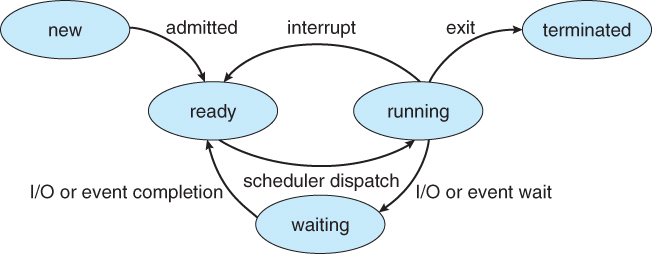
프로세스 상태(process state)는 현재 프로세스가 어떠한 상태에 있는지를 가리키며, 크게 세 가지로 분류된다: 준비(ready), 실행(running), 그리고 대기(waiting) 상태가 있다. 윈도우 운영체제는 프로세스 상태에 따라 어떻게 처리할 지 결정한다. 다음은 프로세스 상태의 설명 및 전환되는 경우를 소개한다.
| 프로세스 상태 | 영문 | 설명 |
|---|---|---|
| 생성 | Created | 프로세스가 처음으로 생성되었을 때의 상태이며, 곧바로 준비 상태로 전환된다. |
| 준비 | Ready | 프로세서가 즉시 실행할 수 있는 준비된 상태이다.
|
| 실행 | Running | 프로세서에 의해 현재 실행되고 있는 상태이다.
|
| 대기 | Waiting | 특정 이벤트가 발생하기 전까지는 프로세서로부터 실행될 수 없는 유예 상태이다.
|
| 종료 | Terminated | 외부에 의해 강제로, 혹은 코드에 의해 종료되었을 시 전환되는 상태이다. |
스케줄링 우선순위
스케줄링 우선순위(scheduling priorities)는 프로세스와 스레드가 생성될 클래스로부터 정해진 우선순위에 따라 결정된 스케줄링 기준이다. 우선순위 범위는 1(최하) ~ 31(최상)까지 있으며, 특수한 경우의 우선순위 0은 오로지 시스템 운영 및 보안을 위한 것으로 영값 페이지 커널 스레드 등에 사용된다. 동일한 우선순위 간에는 라운드 로빈 알고리즘에 의해 공평하게 스케줄링한 다음 차우선순위로 넘어간다.
윈도우 NT에서는 프로세스와 스레드의 우선순위 클래스 및 레벨은 다음과 같다:
-
프로세스 우선순위 클래스
IDLE_PRIORITY_CLASSBELOW_NORMAL_PRIORITY_CLASSNORMAL_PRIORITY_CLASSABOVE_NORMAL_PRIORITY_CLASSHIGH_PRIORITY_CLASSREALTIME_PRIORITY_CLASS
-
스레드 우선순위 레벨
THREAD_PRIORITY_IDLETHREAD_PRIORITY_LOWESTTHREAD_PRIORITY_BELOW_NORMALTHREAD_PRIORITY_NORMALTHREAD_PRIORITY_ABOVE_NORMALTHREAD_PRIORITY_HIGHESTTHREAD_PRIORITY_TIME_CRITICAL
프로세스의 우선순위 클래스와 스레드의 우선순위 레벨의 조합으로부터 각 스레드의 기초 우선순위(base priority)가 형성된다.
인터럽트
인터럽트(interrupt; 간혹 “트랩”이라고도 언급)는 마우스 움직임이나 키보드 입력과 같은 시스템에서 발생한 일종의 비동기 사건, 즉 이벤트(event)가 최우선으로 처리될 수 있도록 프로세서에 요청되는 신호이다. 아래 그림은 인터럽트가 프로세서로부터 처리되는, 즉 인터럽트 서비스(interrupt service) 과정을 간략히 보여준다.
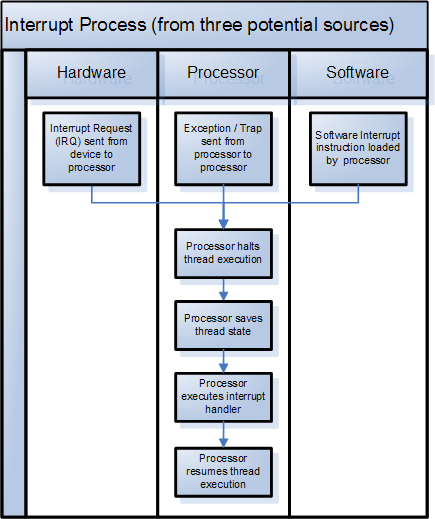
인터럽트를 전달받은 프로세서는 이벤트를 처리하기 위해 현재 실행 중이던 스레드를 잠시 중단시키고 재개되어야 할 시점의 스레드 상태(state)를 저장한다. 각 인터럽트마다 대응되는 함수를 인터럽트 핸들러(interrupt handler) 또는 인터럽트 서비스 루틴(interrupt service routine; ISR)이라고 부르는데, 프로세서에 의해 실행되는 ISR이 바로 이벤트를 처리하는 역할을 한다.
ISR은 실행 중이던 스레드를 중단시켜 프로세서를 점유한 것이므로 최대한 빠른 시간 내에 처리되어야 한다. 그러나 ISR의 작업들이 많아질수록 인터럽트 처리 시간이 길어지는데, 이는 스레드가 재개되는 시점을 미루거나 새로운 인터럽트가 제때 처리되지 못하게 한다. 윈도우 운영체제는 DPC를 제공하므로써 이러한 문제를 해소한다.
마지막으로 프로세서가 중단된 스레드를 다시 실행하므로써 일련의 인터럽트 서비스가 마무리된다.
하드웨어 인터럽트
하드웨어 인터럽트(hardware interrupt)는 마우스, 키보드, 프린터 등의 컴퓨터 하드웨어 또는 외부 장치가 운영체제와 통신 및 상호작용을 하기 위해 발신되는 인터럽트이다.
운영체제는 하드웨어마다 발생되는 인터럽트에 각자 다른 IRQ 값을 지정하여 장치를 분별한다. 만일 두 개 이상의 장치가 동일한 IRQ로 전송하면 혼선이 발생하여 시스템 프리징을 야기한다.
비록 하드웨어 인터럽트는 시스템에 아무 때나 도달할 수 있으나, 결국 프로세서의 클럭 발진기에 의해 동기화된다.
소프트웨어 인터럽트
소프트웨어 인터럽트(software interrupt)는 운영체제가 컴퓨터 하드웨어 또는 외부 장치와 통신 및 동작을 지시하기 위해, 특정 명령어를 실행하거나 조건에 부합하면 프로세서로부터 발신되는 인터럽트이다. 일반적으로 소프트웨어 인터럽트는 운영체제의 커널단에서 수신받아 처리된다.
흔히 커널 프로세스에 나타나서는 안될 특정 소프트웨어 인터럽트가 존재하나, 모종의 이유로 해당 신호가 발신되었다면 시스템 충돌을 초래할 수 있다.
프로그램이 실행되는 도중에 발생한 예외(exception)도 소프트웨어 인터럽트에 해당한다.
지연 프로시저 호출
지연 프로시저 호출(deferred procedure calls; DPC)은 큐에 대기된 작업들을 나중에 한꺼번에 처리하는 매커니즘이다.
인터럽트 핸들러는 기존 스레드를 중단시켜 프로세서를 점유한 것이기 때문에, 원활한 스레드 재개를 위해 인터럽트 서비스는 되도록 빠른 시간 내에 완료되어야 한다. 하지만 인터럽트 핸들러가 처리하는 작업이 많아질수록 인터럽트 서비스 완료에 필요한 시간은 더 길어지게 된다. 이는 스레드가 다시 실행되는 시점을 늦추고 또 다른 인터럽트 처리를 방해하여 매끄럽지 못한 시스템 성능을 야기할 수 있다.
DPC는 필연적이지만 나중에 처리되어도 무관한 낮은 우선순위의 작업들을 실행할 수 있도록 다음 두 가지 특성을 지닌다:
- 인터럽트 서비스가 완료되면 큐에 대기된 작업들이 순서대로 처리된다.
- 인터럽트보다 낮은 IRQL을 가져 새로운 인터럽트 신호가 수신되면 DPC 처리 작업은 서비스 완료 때까지 잠시 중단된다.
과거 운영체제는 인터럽트 핸들러를 1차(First-Level Interrupt Handler; FLIH)와 2차(SLIH)로 나누었으며, 여기서 후자가 윈도우 운영체제의 DPC에 해당한다.
그러나 단일 및 누적 DPC 작업 처리 시간이 각각 20초와 120초를 초과하면 시스템은 이를 비정상 동작으로 인지하여 버그 확인 코드 0x133 DPC_WATCHDOG_VIOLATION이 발생한다.